* fix(plugins): add base64 handling for []byte and remove raw=true Go's json.Marshal automatically base64-encodes []byte fields, but Rust's serde_json serializes Vec<u8> as a JSON array and Python's json.dumps raises TypeError on bytes. This fixes both directions of plugin communication by adding proper base64 encoding/decoding in generated client code. For Rust templates (client and capability): adds a base64_bytes serde helper module with #[serde(with = "base64_bytes")] on all Vec<u8> fields, and adds base64 as a dependency. For Python templates: wraps bytes params with base64.b64encode() and responses with base64.b64decode(). Also removes the raw=true binary framing protocol from all templates, the parser, and the Method type. The raw mechanism added complexity that is no longer needed once []byte works properly over JSON. * fix(plugins): update production code and tests for base64 migration Remove raw=true annotation from SubsonicAPI.CallRaw, delete all raw test fixtures, remove raw-related test cases from parser, generator, and integration tests, and add new test cases validating base64 handling for Rust and Python templates. * fix(plugins): update golden files and regenerate production code Update golden test fixtures for codec and comprehensive services to include base64 handling for []byte fields. Regenerate all production PDK code (Go, Rust, Python) and host wrappers to use standard JSON with base64-encoded byte fields instead of binary framing protocol. * refactor: remove base64 helper duplication from rust template Signed-off-by: Deluan <deluan@navidrome.org> * fix(plugins): add base64 dependency to capabilities' Cargo.toml Signed-off-by: Deluan <deluan@navidrome.org> --------- Signed-off-by: Deluan <deluan@navidrome.org>
![]()
Navidrome Music Server 






![]()
Navidrome is an open source web-based music collection server and streamer. It gives you freedom to listen to your music collection from any browser or mobile device. It's like your personal Spotify!
Note: The master branch may be in an unstable or even broken state during development.
Please use releases instead of
the master branch in order to get a stable set of binaries.
Check out our Live Demo!
Any feedback is welcome! If you need/want a new feature, find a bug or think of any way to improve Navidrome, please file a GitHub issue or join the discussion in our Subreddit. If you want to contribute to the project in any other way (ui/backend dev, translations, themes), please join the chat in our Discord server.
Installation
See instructions on the project's website
Cloud Hosting
PikaPods has partnered with us to offer you an officially supported, cloud-hosted solution. A share of the revenue helps fund the development of Navidrome at no additional cost for you.

Features
- Handles very large music collections
- Streams virtually any audio format available
- Reads and uses all your beautifully curated metadata
- Great support for compilations (Various Artists albums) and box sets (multi-disc albums)
- Multi-user, each user has their own play counts, playlists, favourites, etc...
- Very low resource usage
- Multi-platform, runs on macOS, Linux and Windows. Docker images are also provided
- Ready to use binaries for all major platforms, including Raspberry Pi
- Automatically monitors your library for changes, importing new files and reloading new metadata
- Themeable, modern and responsive Web interface based on Material UI
- Compatible with all Subsonic/Madsonic/Airsonic clients
- Transcoding on the fly. Can be set per user/player. Opus encoding is supported
- Translated to various languages
Translations
Navidrome uses POEditor for translations, and we are always looking for more contributors
Documentation
All documentation can be found in the project's website: https://www.navidrome.org/docs. Here are some useful direct links:
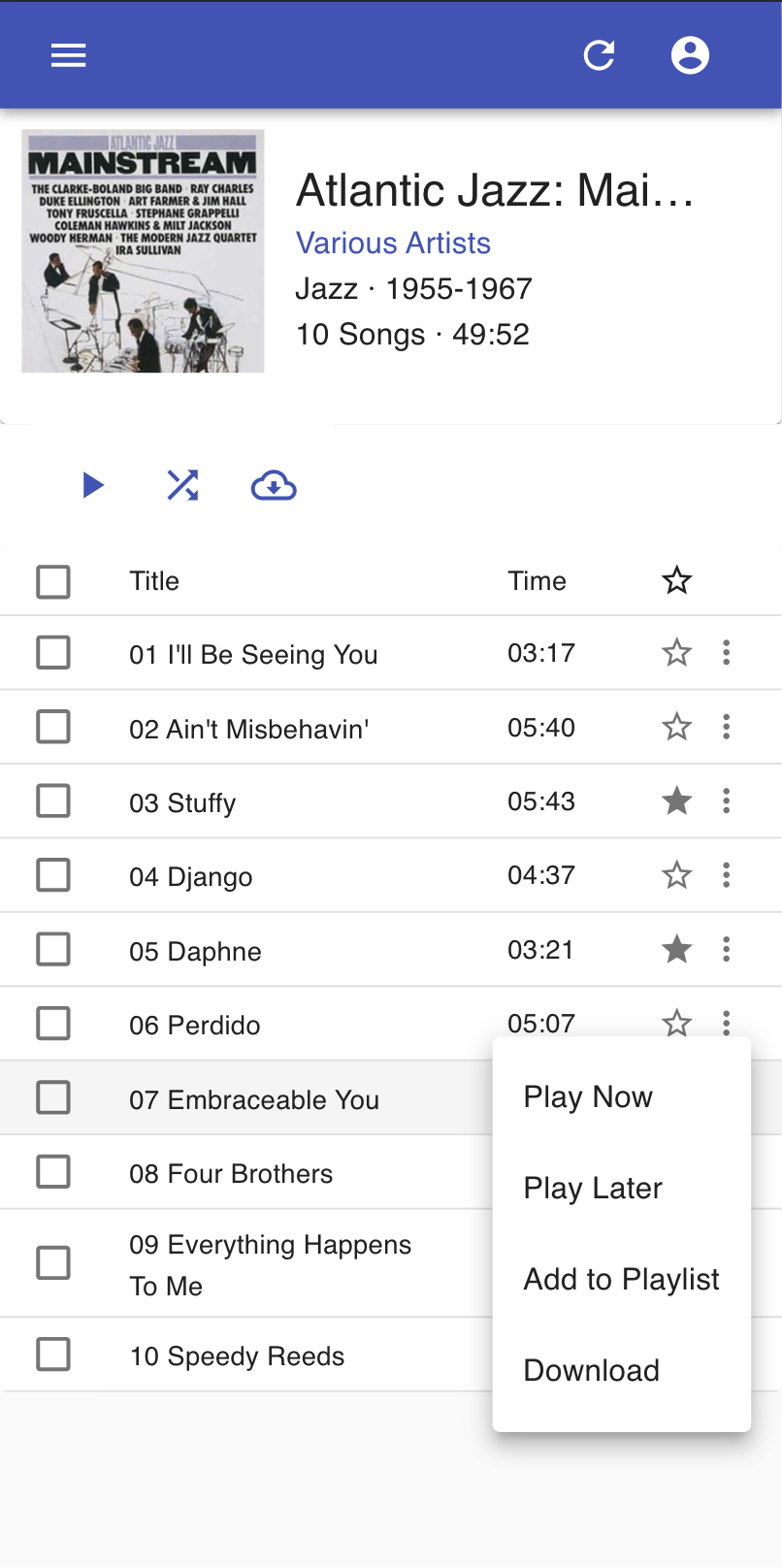
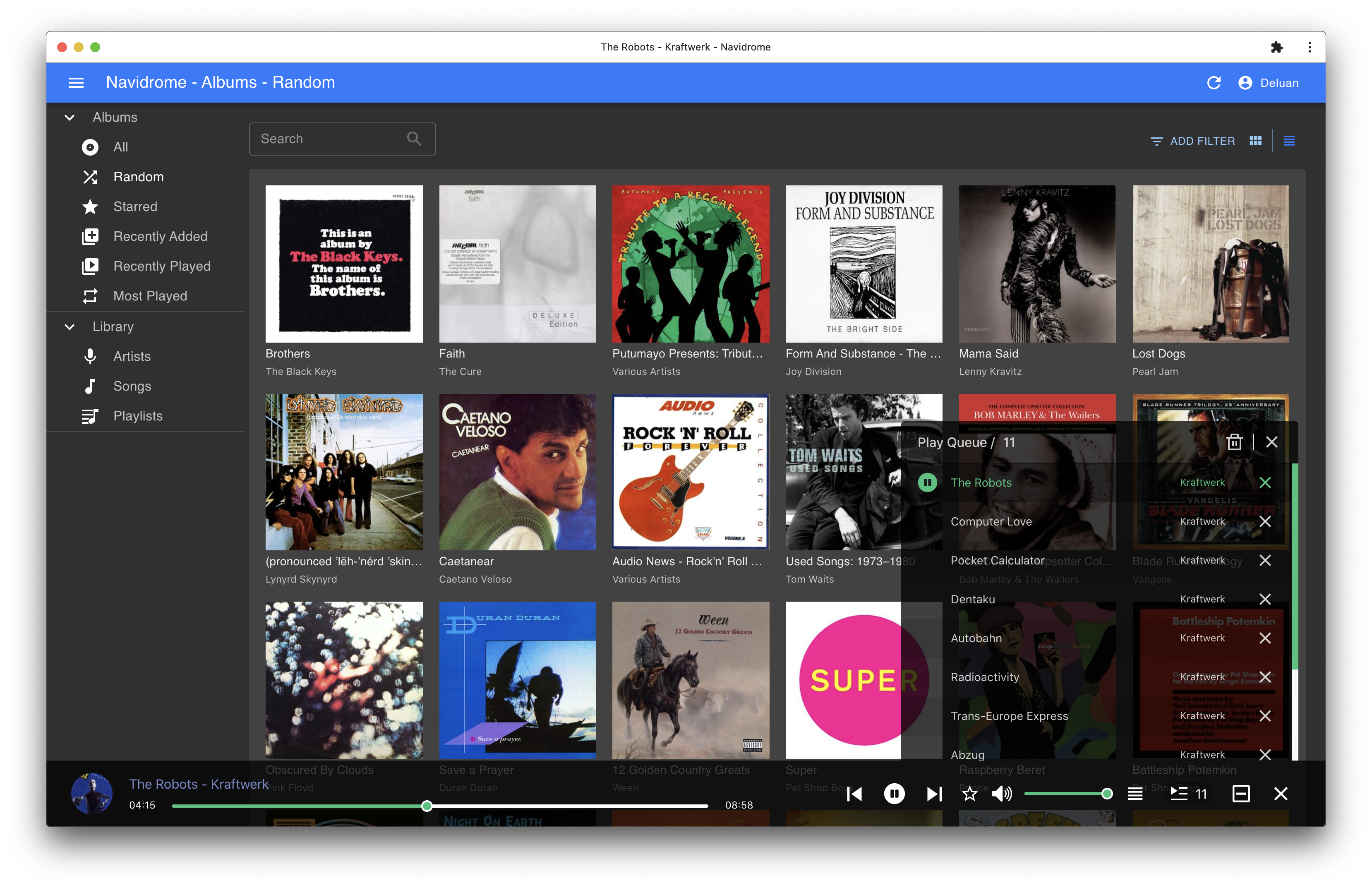
Screenshots